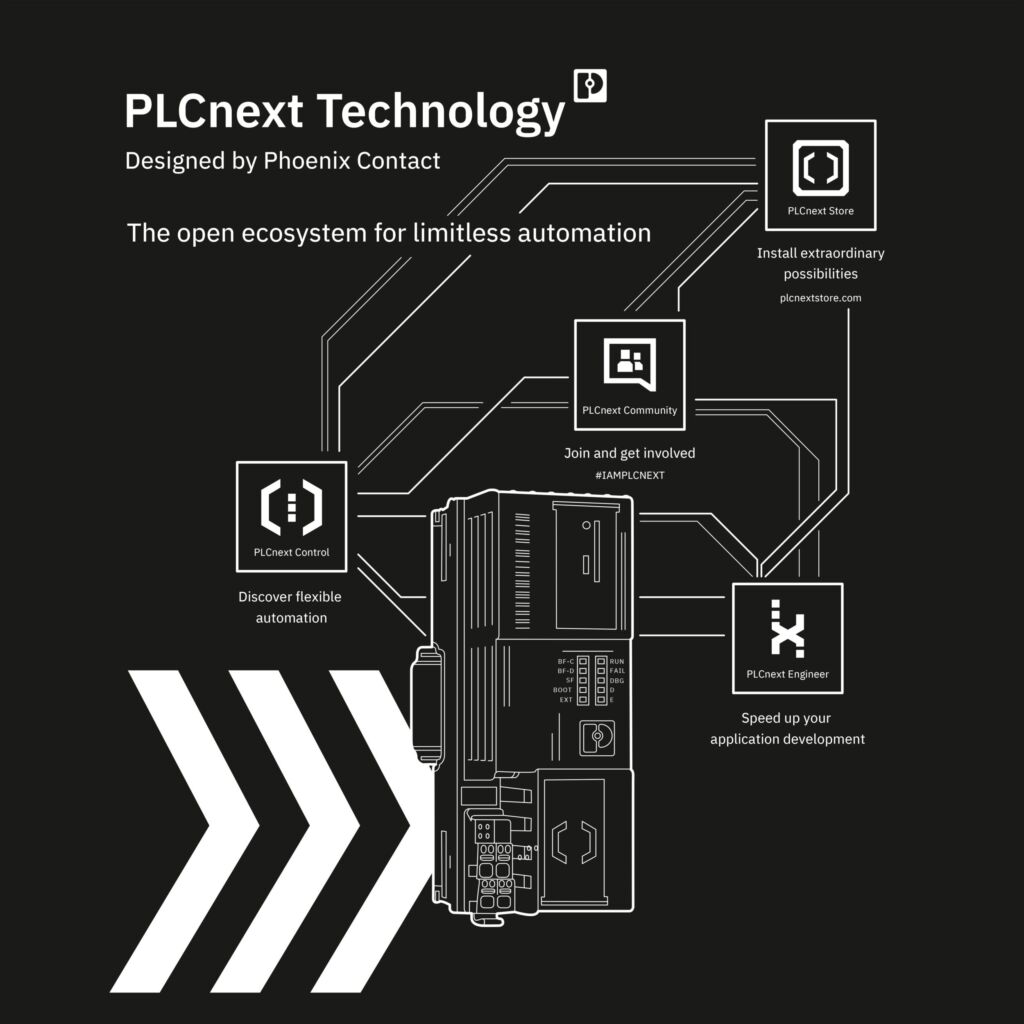
Kostengünstige Systeme verfügen oft über eine weniger fortschrittliche Navigationsmethode, was den Anpassungsaufwand an bestehende Prozesse und die vorhandene Infrastruktur erhöht. Systemintegratoren müssen daher innovative Lösungen verwenden. Gleichzeitig ist dafür Sorge zu tragen, dass Sicherheitsstandards eingehalten werden, um eine reibungslose Mensch-Maschine-Kollaboration zu ermöglichen. Mit dem offenen Ecosystem PLCnext Technology, dem Einsatz der PathCon-Bibliothek und der Kombination mit der AGV-Bibliothek stellt Phoenix Contact hier nicht nur eine flexible Software-Lösung bereit, die eine einfache Adaption an existierende Systeme erlaubt. Darüber hinaus erhält der Anwender einen modularen Designansatz des fahrerlosen Transportsystems (FTS), der sich schrittweise erweitern lässt.
Bei der virtuellen Linienverfolgung (Virtual Line Following, VLF) handelt es sich um eine innovative Technologie, die speziell für FTS entwickelt wurde. Im Gegensatz zu herkömmlichen Navigationsmethoden, die physische oder optische Markierungen wie Magnetstreifen oder Farbmarkierungen auf dem Boden erfordern, basiert VLF auf digital definierten virtuellen Linien. Die freie Navigation verzichtet hingegen auf vorher festgelegte Routen und generiert mithilfe von Algorithmen eigene Routen. Dies hat jedoch den Nachteil, dass erhebliche Rechenkapazitäten notwendig sind. Außerdem können weitere Risiken durch unvorhersehbare Routenplanungen entstehen. Durch die Einbindung von VLF profitieren Unternehmen von einer präzisen und zuverlässigen Navigation, ohne wesentliche Eingriffe in die vorhandene Infrastruktur vornehmen zu müssen. Dies erlaubt den Betrieben, ihre Materialflussprozesse flexibel, kosteneffizient und zukunftsorientiert zu optimieren.
Integration der PathCon-Bibliothek in das Applikationsprojekt
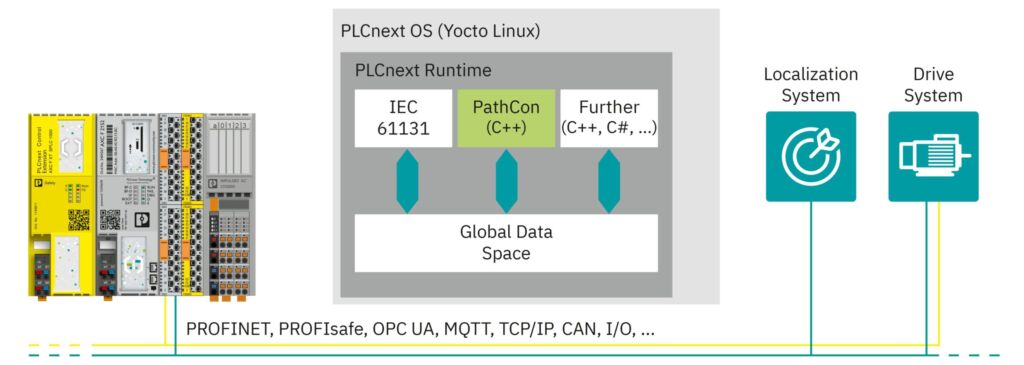
Im ersten Schritt wird das Streckennetz, das auf dem Grundriss der entsprechenden Umgebung beruht, mit einer dedizierten CAD-Software erzeugt und im Anschluss als CSV-Datei exportiert. Die CSV-Datei beinhaltet alle Streckeninformationen, bestehend aus Kanten und Knoten der einzelnen Streckensegmente. Dies hat den Vorteil, dass die Planung des Streckennetzes bereits ohne ein Fahrzeug umgesetzt werden kann. Um die Realisierbarkeit des Streckennetzes sicherzustellen, berücksichtigt die CAD-Software verschiedene FTS-Parameter und applikative Einschränkungen. Dazu zählen unter anderem die Abmessungen der FTS, die Kinematik sowie technische Grenzen, z.B. der maximale Lenkwinkel und die Geschwindigkeiten in unterschiedlichen Szenarien. Im nächsten Schritt wird die PathCon-Bibliothek als Kernkomponente der Lösung in das Applikationsprojekt der Steuerung PLCnext Control integriert und eingerichtet.
Zur erfolgreichen Umsetzung einer virtuellen Linienverfolgung übernimmt die Bibliothek folgende Aufgaben:
• Einlesen des Streckennetzes
• Sensorfusion von Lokalisierung und Odometrie
• Bahnregelung einer virtuellen Sollspur, die durch die Streckensegmente vorgegeben ist.
Dabei werden die berechneten Sollgeschwindigkeiten für das jeweilige Antriebssystem bereitgestellt. Zur Ansteuerung der Streckensegmente steht eine Programmkomponente, im weiteren als Modul bezeichnet, innerhalb der AGV-Bibliothek zur Verfügung.
Nutzung einer AGV-Bibliothek mit vielfältigen Funktionen
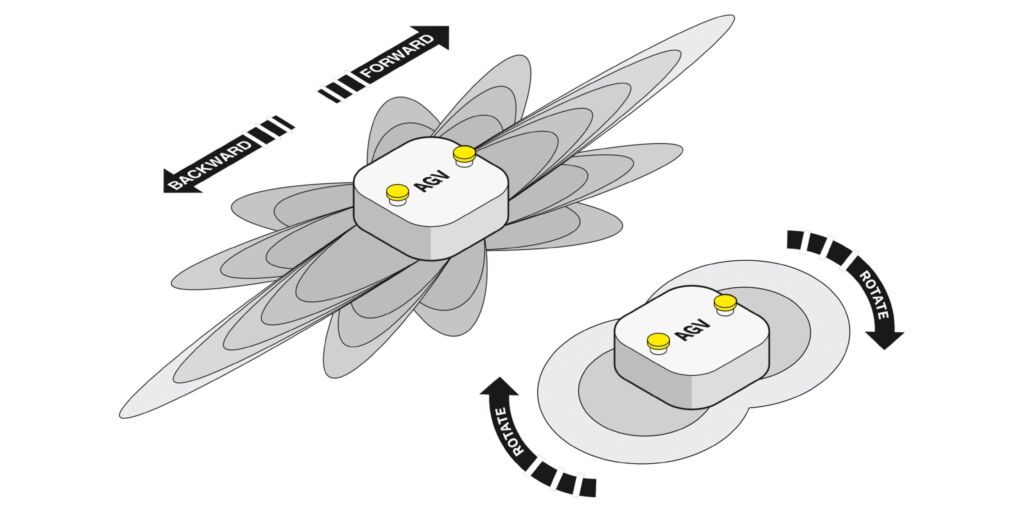
Die AGV-Bibliothek umfasst eine Sammlung von Software-Modulen, die speziell für die Implementierung und Steuerung von FTS entwickelt wurde. Die Bibliothek bietet eine Vielzahl von Funktionen, welche die Erarbeitung, Einbindung und Wartung von FTS erleichtern. Im Vordergrund steht das Baukastenprinzip durch verschiedene unabhängige Module, die jeweils spezifische Funktionen abdecken. Ein Kommunikationsmodul ermöglicht beispielsweise die Konfiguration und Verwaltung der Wlan-Verbindung eines Fahrzeugs. Positionsdaten von einem Lokalisierungssystem werden über ein anderes Modul empfangen und zur Regelung des Fahrzeugs weitergeleitet. Ein zusätzliches Modul ist für die Ansteuerung des Antriebssystems in den unterschiedlichen Betriebsarten verantwortlich.
Ein zusätzlicher wichtiger Aspekt ergibt sich aus der Synergienutzung. Durch die Verwendung vorhandener Funktionen von sogenannten Hilfsmodulen, die z.B. das Alarmmanagement beinhalten, können sich die Anwender auf die wesentliche Funktion der Module fokussieren. Das sorgt für Komfort sowie eine effizientere Zusammenarbeit der verschiedenen Teilsysteme und verkürzt den Entwicklungsaufwand. Daraus resultiert wiederum eine flexible Anpassung an die individuellen Anforderungen eines Projekts, da lediglich die benötigten Module eingesetzt werden müssen.
Umsetzung sicherheitsrelevanter Funktionen gemäß EN ISO3691-4
Aufgrund der PLCnext Technology können solche Projekte auch durch sicherheitsrelevante Funktionen erweitert werden. Die Technologie eröffnet die Möglichkeit, spezielle Sicherheitsanforderungen zu erfüllen und für die Betriebssicherheit der FTS zu sorgen. Als wesentlicher Standard erweist sich in diesem Zusammenhang die Norm EN ISO 3691-4, die Sicherheitsanforderungen für fahrerlose Flurförderzeuge und ihre Systeme festlegt. Die Norm stellt sicher, dass die Fahrzeuge unter sicheren Bedingungen betrieben und sämtliche relevanten Sicherheitsaspekte berücksichtigt werden. Die darin beschriebenen sicheren Funktionen, wie Kollisionsvermeidung und sichere Geschwindigkeitsüberwachung, lassen sich nahtlos in das Gesamtsystem integrieren. Sie können mit der Entwicklungsumgebung PLCnext Engineer projektiert werden.