Vom stabilen, prozesssicheren Entnehmen von Teilen bis zur gezielten, kontrollierten und bei Bedarf auch orientierten Einzelablage berücksichtigt der ganzheitliche Ansatz dieser Bildverarbeitungslösung alle Aspekte einer automatisierten Entnahme von Teilen aus chaotischen Szenarien einschließlich der prozesssicheren Handhabung. Hierunter fällt auch die Einbeziehung der Kunden in die Auslegung und Optimierung ihrer Systemlösung – vom Projektstart über die Inbetriebnahme und Schulung bis zum After-Sales-Service. VMT PickFinder3D ermöglicht dabei ein optimiertes Design sowohl von reinen Bin-Picking-Lösungen als auch von vollständigen Applikationszellen, die sich nahtlos in Prozessketten integrieren lassen.
Das offene Konzept bietet dabei höchste Flexibilität und Anpassungsfähigkeit an die Aufgabenstellung. So können nahezu beliebige 3D-Sensoren angebunden und die Greiftechnik des Roboters individuell ausgelegt und ausgewählt werden. VMT PickFinder3D unterstützt die Steuerungen aller großen Roboterhersteller sowie alle gängigen Feldbusstandards. Die mit Softwaremodulen von VMT oder von anderen Anbietern frei konfigurierbare Auswertesoftwareplattform MSS (MultiSensorSystem) von VMT erlaubt die konsequente Adaption des Griffs in die Kiste an die jeweilige Aufgabenstellung wie auch an besondere Kundenwünsche. Die PXL+-Technologie – eine eingetragene Marke von Pepperl+Fuchs, zu der VMT Bildverarbeitungssysteme gehört – eröffnet völlig neue Möglichkeiten der Entnahme aus chaotischen oder teil-chaotischen Szenarien, beispielsweise eine Teileselektion nach Farbauswahl, Luminophor-Markierung oder nach Wärmestrahlung.
Chaos in der Kiste maschinell beherrschbar machen
Ob bei der Zuführung von Teilen in Verbau- und Montageprozesse oder der Bereitstellung von Artikeln in der Kommissionierung – in diesen und zahlreichen weiteren Fällen erfolgt die Bereitstellung großer Teilemengen oft aus Prozessgründen als Schüttgut chaotisch angeordnet in einem Kleinladungsträger oder einem Kommissionierbehälter. Oder es werden vorsortierte, gestapelte Teile angeliefert – und der Stapel fällt um und erzeugt ein beliebiges Teilemuster. Beides alltägliche Szenarien, die ein Mensch beim Entnehmen von Teilen sehr intuitiv lösen kann. Für eine Maschine hingegen ist die Aufgabe äußerst komplex, denn die Teile müssen im Behälter sicher identifiziert, in ihrer dreidimensionalen Lage und Ausrichtung erkannt und bei unsortiertem Inhalt zudem eindeutig unterschieden werden. Das Greifmittel, die Hand des Roboters, soll möglichst klein und flexibel sein, ist aber auch exakt auf die Eigenschaften der zu greifenden Teile abzustimmen. Die Geometrie ist dabei nur ein Aspekt – auch ein Verhaken oder Aneinanderhaften von Teilen muss greif- und prozesstechnisch berücksichtigt werden. Die zeitliche Performance der Detektions- und Greiflösung muss optimal zu Robotertakt und Prozesszyklus passen. Schließlich ist ein zuverlässiger Roboterbetrieb zu gewährleisten – frei von Kollisionen mit Kisten und der Blockade von Bewegungen. Wohl kein PnP-System zur Roboterführung kann all dies ‚ab Werk‘ berücksichtigen – was dann am Maschinenbauer, Integrator oder gar dem Betreiber hängen bleibt. VMT PickFinder3D hingegen steht für die Planung und die optimierte Auslegung von Robot Vision durch VMT. Das schüsselfertige Lösungskonzept aus Sensorik, MSS-Software, Auswerte-PC, Verkabelung, Inbetriebnahme, Schulung und After-Sales-Betreuung macht die automatisierte Teileentnahme aus chaotischen Szenarien sehr integrations- und bedienfreundlich, maschinell beherrschbar und dauerhaft verfügbar. Mit einer hängenden Beschilderung über 18.000 Stellplätzen hat ONK den Boden für die Digitalisierung im Lager von Feldsaaten Freudenberger bereitet. ‣ weiterlesen
Flexibilität hängt oben
Bestmögliche Performance bereits integriert
Hochperformante Bin-Picking-Lösungen, wie sie VMT PickFinder3D ermöglicht, entstehen deutlich vor dem erstmaligen Griff in die Kiste. Das Wichtigste sind oftmals auch nicht der Sensor oder die Software, sondern eine sorgfältige Analyse der Anforderungen, des Prozesses und Randbedingungen. VMT, mit mehr als 25 Jahren Erfahrung in der kamerabasierten Automatisierung von Robotern, gewährleistet von Anfang an ein fehlerfreies Lösungsdesign, beispielsweise beim Layout der gesamten Zellenlösung oder dem Auslegen von Übergabeprozessen und Zwischenablagen. Letztere können der besseren Greif- und Übergabegenauigkeit dienen, eine prozessgerechte Orientierung des Teils ermöglichen oder als Teilepuffer fungieren. Entscheidend für die Performance des Bin Picking ist auch das richtig auf die Aufgabenstellung angepasste Design der Greifelemente. Zwei- oder Mehrfingergreifer, Magnet- oder Vakuumgreifer, Parallel- oder Innengreifer – die richtige Auswahl hängt von den zu greifenden Teilen, dem Behälter, in dem sie sich befinden, sowie von den weiteren Prozessschritten ab. VMT projektiert für jede Applikation mit dem VMT PickFinder3D die passende Greiferlösung, die dann in der Folge auch bei der Berechnung der sicheren Greifkoordinaten und der optimalen Roboterbahn berücksichtigt wird.
VMT PickFinder3D punktet zusätzlich mit Sensoroffenheit – neben den 3D-Sensoren VMT LightScan und VMT DeepScan von VMT können auch die Geräte anderer Hersteller in die Lösung integriert werden. Dies stellt sicher, dass für jede Anwendung der applikations- und messtechnisch am besten geeignete Sensor ausgewählt werden kann – ganz gleich, ob er am Roboter, über dem Behälter oder seitlich montiert wird. Bei Bedarf ist es möglich, simultan mehrere 3D-Sensoren als Sensorsystem einzusetzen, beispielsweise bei großen oder nicht gängigen Behälterformaten. Ebenfalls integrierbar ist eine 2D-Flächenkamera zur Nachkontrolle der gegriffenen Bauteile. Die Systemanbindung bietet ebenfalls zahlreiche Freiheitsgrade, unter anderem hinsichtlich unterschiedlicher Automatisierungssysteme und Robotersteuerungen sowie der industrieüblichen Feldbusschnittstellen.
Greifen nach Attraktivität bedeutet Prozesssicherheit
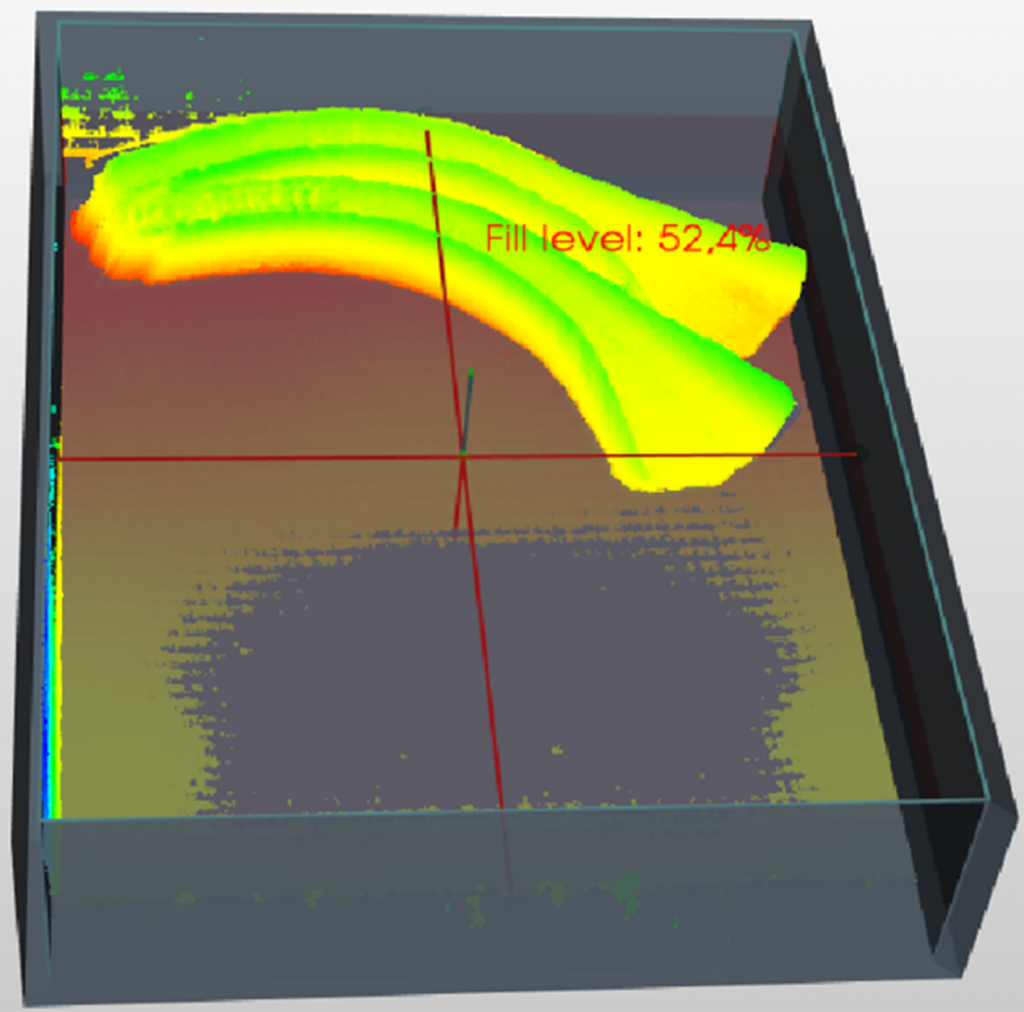
Jeder Griff in die Kiste beginnt mit einem Blick in die Kiste. Hierfür macht der Sensor eine Aufnahme der Bauteile-Szenerie im Behälter und ermittelt ein präzises 3D-Profil der darin befindlichen Objekte. Dabei kann VMT PickFinder3D auch verschiedene Komponenten in derselben Szenerie unterscheiden und handhaben. Farben, Oberflächen und Reflexionseigenschaften haben keinen Einfluss auf die Zuverlässigkeit und Genauigkeit der Erkennung. Die Rohdaten in Form einer Punktwolke werden von der MSS-Software vorverarbeitet. Hierbei werden zum einen die Geometrie, die Position und die Ausrichtung des Behälters erkannt und die Kerndaten dieser ‚Region of Interest‘ aus den Rohdaten gefiltert. Zum anderen werden messtechnische Ausreißer eliminiert. Die per CAD hinterlegten oder über die Kamera eingelernten Teile werden dann durch effiziente Matchingverfahren in der Punktwolke gesucht und identifiziert. Die Software errechnet dabei für jedes erkannte Teil ein Profil seiner Griffattraktivität und erstellt daraus eine Priorisierungsliste der Greifkandidaten. Hierbei können besondere Vorgaben des Anwenders berücksichtigt werden, um beispielsweise zunächst nur Teile einer bestimmten Lage zu greifen. Für den letztlich ausgewählten Greifkandidaten werden die Koordinaten für das sichere Greifen ermittelt. Gleichzeitig wird die Roboterbahn für die Greif- und Entnahmebewegung des Roboters berechnet und auf Singularität und Greifbarkeit des Teils sowie Kollisionsfreiheit geprüft. Hierbei wird dem Roboter eine Vielpunktbahn vorgegeben, die alle Hindernisse berücksichtigt, so dass ein Anfahren an das Teil und Ausfahren aus der Kiste ohne Kollision sichergestellt ist. Lösungen mit dem VMT PickFinder3D gewährleisten so höchste Performance und Prozesssicherheit beim Bin Picking.