Die intelligente Überwachung und Planung aller intralogischen Prozesse sowie der eingesetzten Anlagen bzw. Systeme ist zwingende Voraussetzung für eine effiziente Fertigung. Vielerorts werden die AGV noch klassisch in Excel-Kalkulationen geplant. Das Problem: der dynamische Aspekt automatisierter Transportsysteme kann mit dieser statischen Planung nicht ausreichend betrachtet werden.
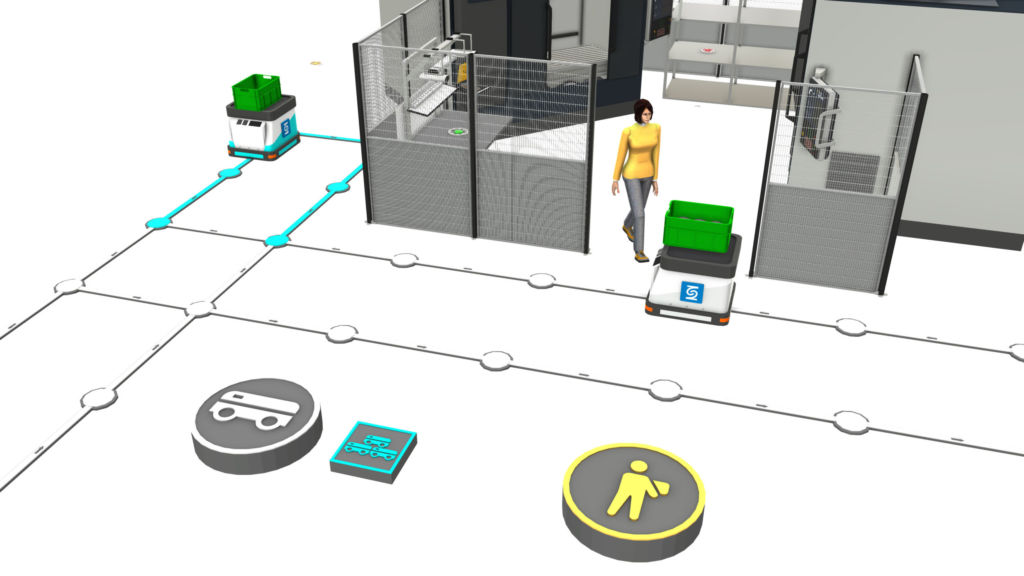
Mittels einer 3D-Simulationsplattform lassen sich alle Faktoren vorausschauend planen, beispielsweise mit der Lösung Visual Components. Eine von Dualis IT Solution entwickelte AGV-Bibliothek als Teil der Simulationslösung ermöglicht eine optimierte Streckenplanung und Aufgabenverwaltung von fahrer-losen Transportfahrzeugen.
Dynamik als Herausforderung für die Planung von AGV-Prozessen
Die Planung von AGVs unterliegt jedoch einigen Herausforderungen. Fahrerlose Transportsysteme können sich in der Regel nicht frei und ungehindert durch die Fabrikhalle bewegen. Insbesondere bei Begegnungen mit anderen AGVs oder Ressourcen sind sie gezwungen, zu warten. Im ungünstigsten Fall kann es sogar zu einem blockierenden „Deadlock“ kommen. Auch die Akkukapazität eines fahrerlosen Fahrzeugs stellt einen dynamischen Faktor dar. Beim Ladevorgang ist das Automated Guided Vehicle nicht einsatzbereit und kann somit für einen längeren Zeitraum für Transportaufgaben nicht genutzt werden. Ein weiterer Unsicherheitsfaktor bei der Planung sind die Transportaufträge. Eine gleichmäßig verteilte Aufgabenlast ist in der Regel keine realistische Annahme. Eine Simulation kann in all diesen Punkten und Fragen Aufschluss bringen. Auch Fahrzeugausfälle und andere Störfaktoren können dabei einbezogen werden. Mit einer hängenden Beschilderung über 18.000 Stellplätzen hat ONK den Boden für die Digitalisierung im Lager von Feldsaaten Freudenberger bereitet. ‣ weiterlesen
Flexibilität hängt oben
Für die Auslegung von AGV-Systemen stellen sich zahlreiche strategische Fragen. Soll z.B. die Fahrzeugflotte zentral verwaltet werden oder wäre eine Unterteilung in Cluster, in denen die Aufgaben zugeordnet werden, die bessere Wahl? Zu eruieren ist außerdem, wie die verfügbaren Jobs optimal auf die Fahrzeuge verteilt werden können. Auch die Reihenfolge ihrer Abarbeitung muss festgelegt werden. Des Weiteren ist eine Routenplanung vorzunehmen. Diese und andere Fragestellungen kann eine Simulation als digitales Experimentierumfeld beantworten.
Realistische Abbildung unerlässlich für zuverlässige Aussagen
Voraussetzung für die zuverlässige Beantwortung ist eine realistische Abbildung der Fahrzeugsysteme. AGV-Systeme sind nicht nur komplex, sondern auch vielseitig, was sich in verschiedenen Fahrzeugkonzepten widerspiegelt. Auch die Anzahl der Hersteller von Automated Guided Vehicles ist hoch. Für die Simulation ist daher eine einheitliche Lösung für verschiedenste Transportkonzepte von Vorteil.
Bei einer Simulation der AGV werden alle dynamischen Abhängigkeiten mit einbezogen. Verglichen mit einer statischen Auslegung erhalten Verantwortliche so eine deutlich bessere Planungssicherheit. Eine falsche Dimensionierung kann wirtschaftliche Folgen und erhebliche Zusatzkosten verursachen. Basierend auf einer guten Datengrundlage lassen sich Investitionsentscheidungen dagegen besser treffen. Ein bestehendes Konzept lässt sich zudem im digitalen Modell auf Verbesserungspotenzial prüfen. Änderungen können so mit geringem Aufwand umgesetzt und bezüglich ihrer Wirksamkeit bewertet werden.
Virtuelle Inbetriebnahme von AGV
Die Verwaltung von AGV übernimmt in der Praxis oftmals eine Flotten-Manager-Software. Hierbei kann zusätzlich eine Simulation als digitaler Zwilling eingesetzt werden. Der digitale Zwilling ist in der Lage, die Flotten-Manager-Software im Rahmen einer Virtuellen Inbetriebnahme zu validieren. Dabei gilt: auch fertige Software-Lösungen müssen konfiguriert werden. Wird ein System über einen langen Zeitraum nicht ausreichend geplant, kann es eine schlechtere Effizienz auf Kosten des Durchsatzes aufweisen. Voraussetzung sind vorhandene Schnittstellen zwischen der Simulation und der in der Praxis verbreiteten Flotten-Managern.